
Witajcie rodacy, dzisiaj zbudujemy sobie drona innego niz do tej pory – ten bedzie na prawde szybki i lekki. Zapraszam do budowy.
Jezeli chodzi o komponenty to mamy tutaj wszytko co dobre, rama KC Frames 215 lekka a zarazem wytrzymala, antenka to oczywiscie nowy foxeer lolipop idealna do tego buildu. ESC to 4 kostki Wraith32 v2 od Airbot’a – te oblusguja Dshot1200, nie zabraklo VTX’a z mozliwoscia zmiany mocy, no i sprawdzone przezemnie juz nie raz Garile tutaj mam wielkosc 2406 a moc 2650kv, sercem calosci to Omnibus Corner czyli ponownie Airbot.

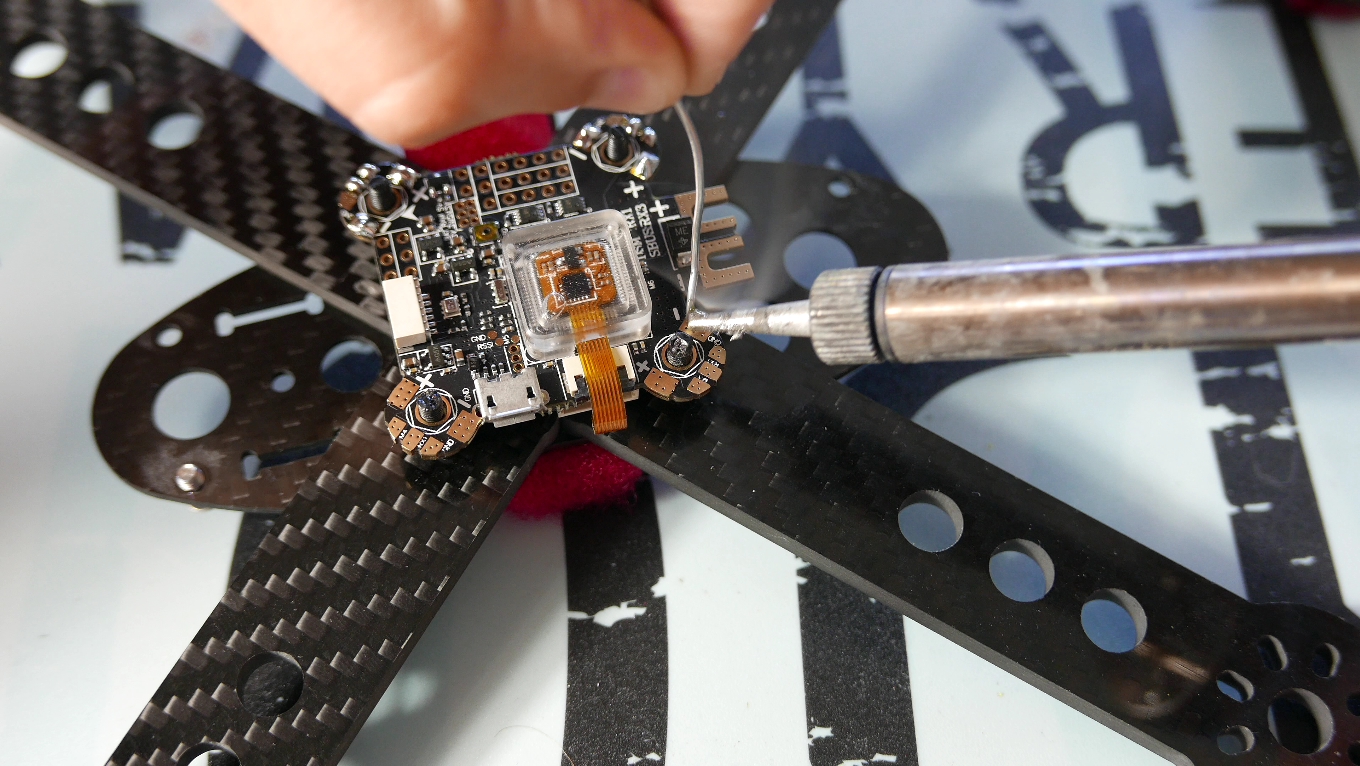
Zabieram sie zatem za przygotowanie padow w tym kontrolerze lotu i przy okazji powiem wam czemu on jest na prawde dobrym FC. Prawie na srodku widzicie zamkniety w plastikowym boxie ICM20608, jest to bardzo wrazliwy i szybki zyroskop mogacy udzwignoc samplowanie 32/32. Zamkniety jednak jest nie dlatego ze jest niepoczytalny, ale dlatego ze pod nim jest miecutka pianka tak wiec wszelkie wibracje koptera juz tam sa eliminowane. To dodatkowo nie zmusza nas by uzywac uzywac gumek czy tez softmountu jak wolicie angielki podczas instalacji na naszej ramie. Milym rowniez patentem jest danie nam 4 portów TX1 na rogach, do czego ten pad sluzy – do telemetri. Nasze ESC ją wspieraja tak wiec lutowanie bedzie tutaj po prostu przyjemnoscia, a calosc bedzie wygladala duzo ladniej. Po wiecej informacji technicznych odsylam was standardowo do linków w opisie.
Oki, pady przygotowane czas wziac ESC, tutaj jak widzicie na dole mamy duzego Pada minusowego, idac dalej do malych dziurek jest to kolejny ground, na srodku mamy RX czyli pad od telemetri, nastepnie jest PMW czyli silnik no i duzy plus. Wiedzac to wszystko moge zatem powoli laczyc ESC z FC. Na poczatek przylutujmy sobie kabel AWG 12 – jest to standardowy przewod do tego typu dzialan majacy duza przepustowosc pradu. Okej tutaj wszystko poszlo gladziutko, teraz zostaly nam dwa mniejsze kable od sterowania silnikiem i telemetri, ostatni jest ground – ale tutaj nie ma zadnej potrzeby go instalowac dlatego ja sobie go daruje.
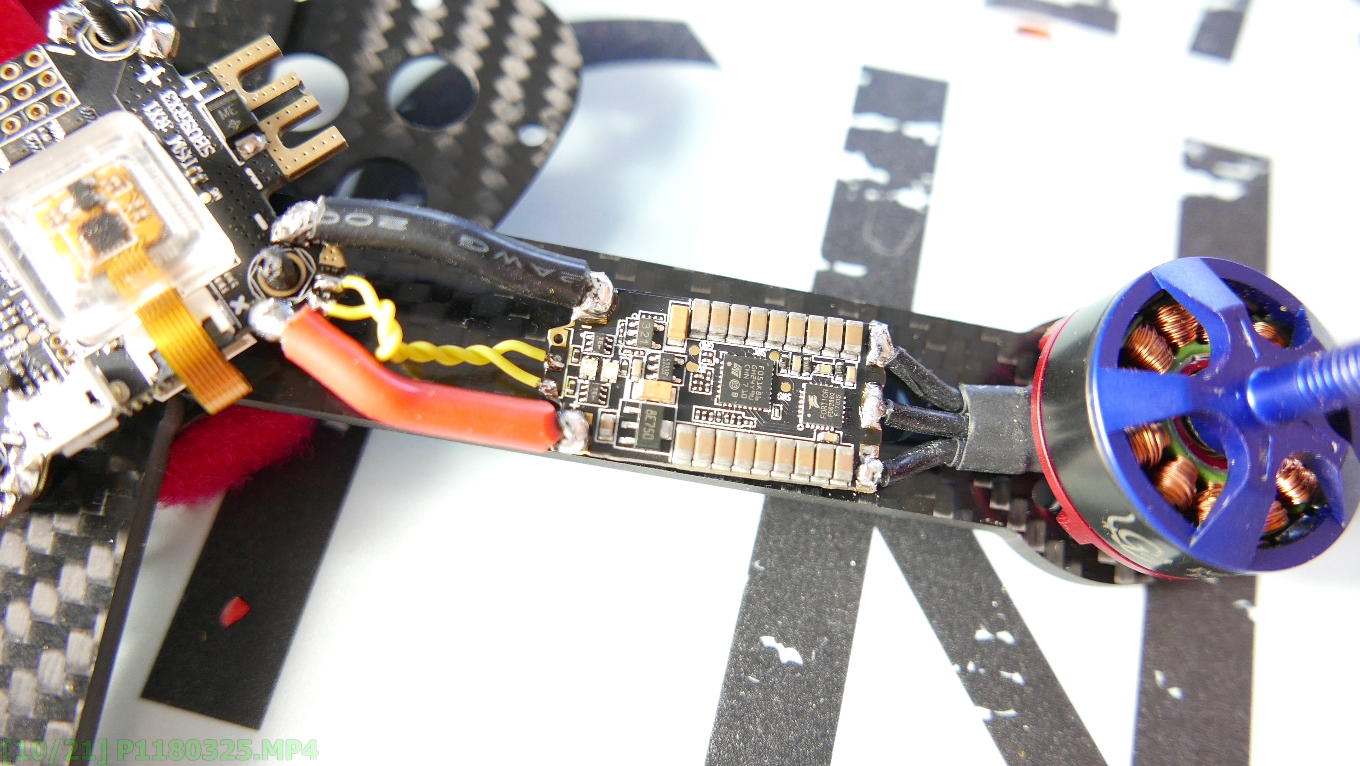
Przygotuje teraz pady z jednej strony regla, a w miedzy czasie troche o nim opowiem. Oblusguje on oprogramowanie Blheli_32, czyli juz 3generacje i na dzien dzisiejszy najnowszą. To daje nam mnozliwosci programowania, telemetrie, auto tajmingow, a silniki beda slyszalnie lepiej, bardziej gladko chodzily. Oczywiscie jest tu Dshoot1200 ktory wspiera 32kHz. Dodatkowo te regulatory moga udzwignac baterie do 6s. Ciekawostka jest natomiast mozliwosc wgrania melodyjek, tzn. ze po podlaczeniu drona do lipo wybrzmi nam np. motyw glowny ze star worsów.
Dobra, czas zabrac sie przylutowacnie tego czerwonego kabla, tutaj troche sie z nim pomeczylem i ostatecznie zostal on przylutowany do tego pada w esc, ale zdecydowanie za malo tam jest cyny dlatego w podejsciu numer dwa wzialem ją i zaczalem dosc ostroznie lac nia z gory aby rozplynela sie na calym uzwojeniu. Majac pod uwage ze ewidetnie za malo jest i na drugim padzie minusowym tak i tu nadrobilem swoj blad i dodalem tam conieco cyny. Teraz jak widzicie nie ma problemu by wszystko mocno zostalo przylutowane ze soba, oczywiscie przy takiej ilosci cyny moja lutownica jest ustawiona na 350 stopni tak wiec jej topnienie jak widzicie przebiega bezproblemowo.
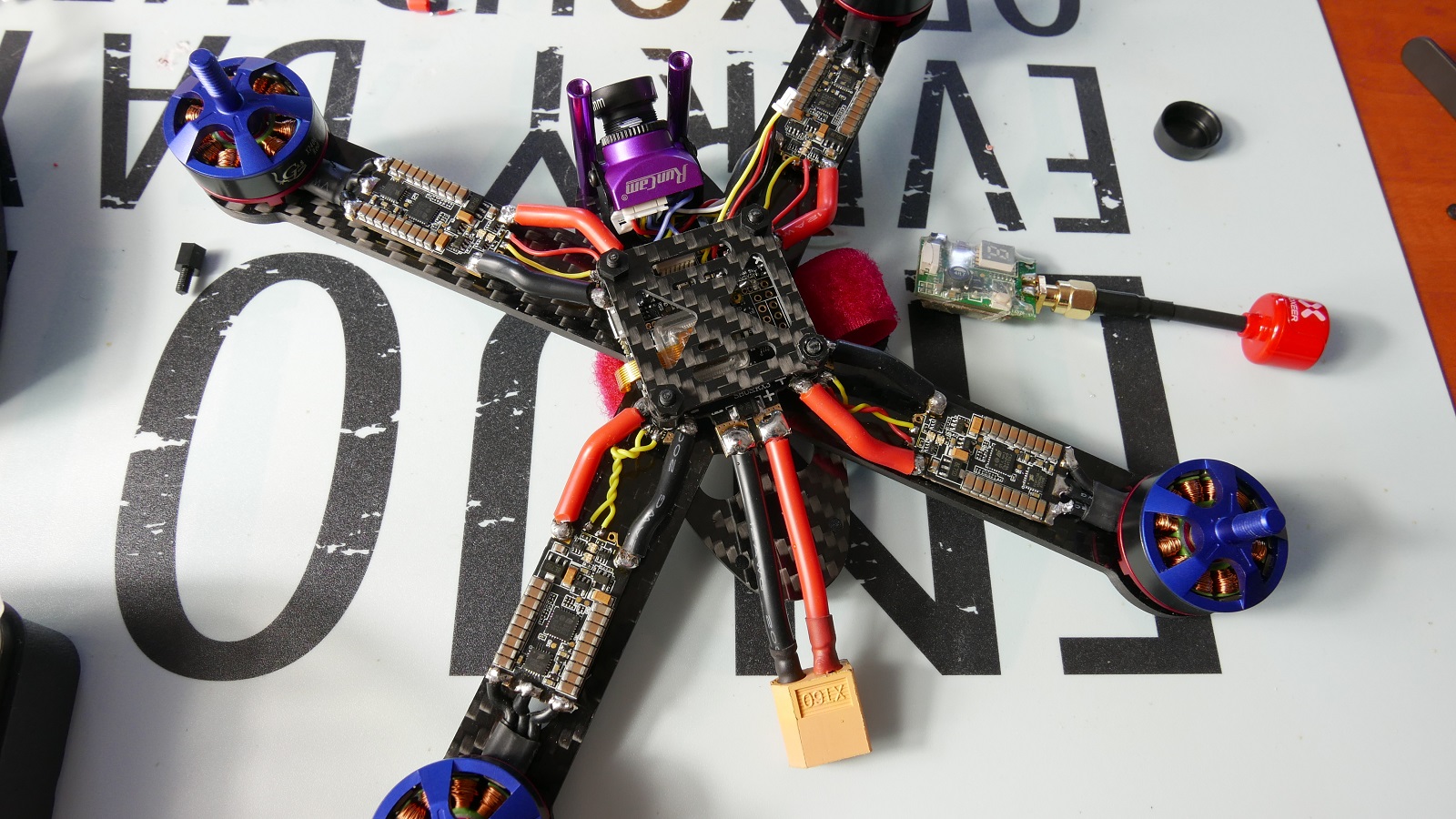

Czas teraz na silniki, poza wizja oczywiscie je odpownie skroliciem po kable mialy ponad 10cm – a taka dlugosc jest tutaj nie potrzebna. Pamietajcie rowniez ze nie ma tak na prawde znaczenia ktory kabel gdzie tutaj przylutujecie bo potem i tak w Blheli bedziecie musieli odwrocic ciag silnikow by kazde sie krecily w odpowiednia strone. No dobra, tak na prawde jedno z czterzech ramion mamy zrobione – teraz by bez sensu nie przedluzac dokladnie to samo powtorze jeszcze 3 razy. I włala powstal nam taki oto pajączek, powiem wam ze wyszlo na prawde ladnie, a luty sa moze nie idealne ale na 5- w moim mniemaniu na pewno zasluguja.
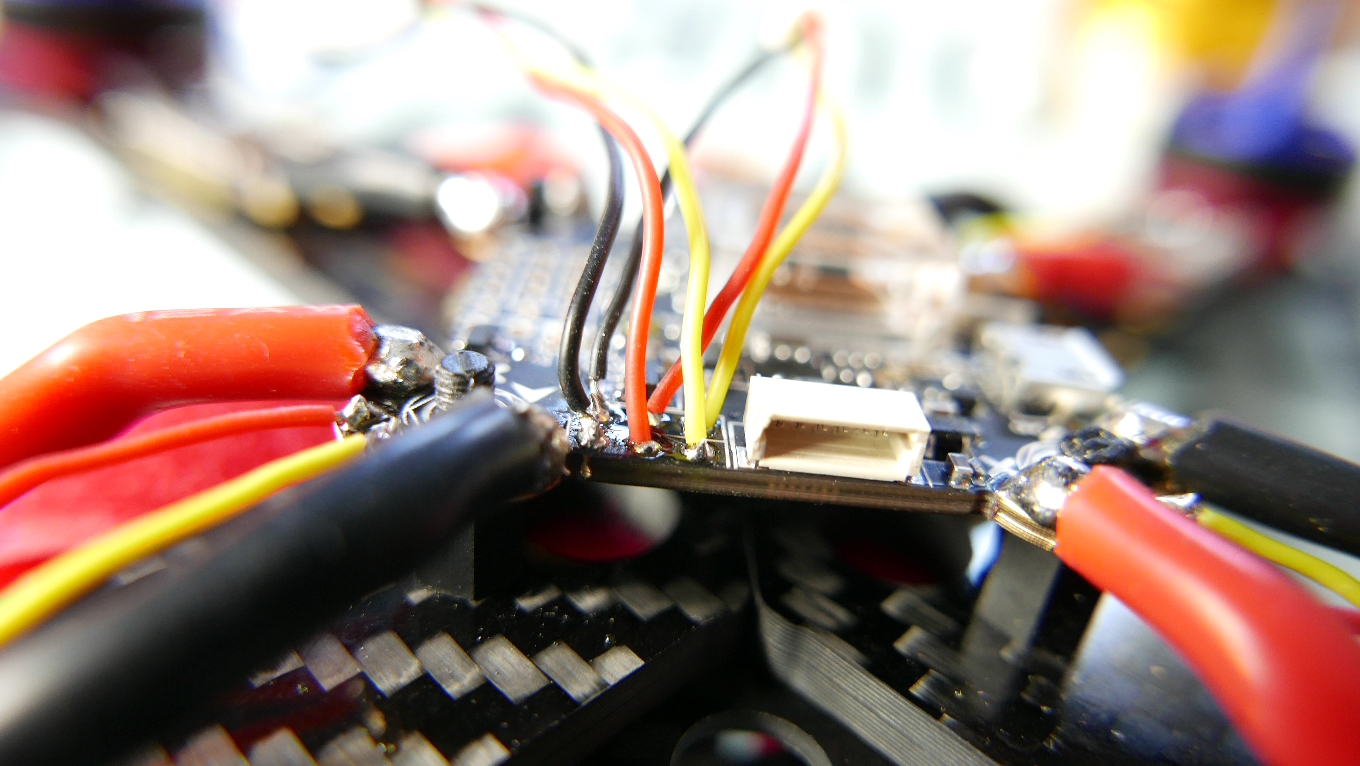
Ok, teraz czas na te 6 mniejszych padow – mamy tutaj wszystko czego potrzebuje najnowsza na dzien dzisiejszy kamera Runcam Micro Sparrow 2 Pro no i nasz VTX od Eachine. Jednak by te dwie rzeczy nam dzialaly potrzeba jeszcze jednej myku, a mianowicie polaczyc dwa pady ze soba, jezeli srodkowy polaczymy z prawym dostaniemy 5V a jezeli z lewym pelny Vbat. Teraz tylko sprawdze czy wszystko dziala no i jak widzicie mamy obraz w goglach tak wiec wszystko ladnie zamykam i wracam do was za 3, 2, 1.

Reasumując: w ten oto sposob zrobilismy drona mogacego latac z bateriami od 3 do nawet 6s. Wazy on dodatkowo bardzo malo bowiem 320gram bez bateri to waga na prawde lekka. Patrzac rowniez na zastosowane topowe podzespoly to tym pociskiem na prawde bedzie mozna uzyskac bardzo wysokie predkosci. No i wyglada on rowniez po prostu elegancko i minimalistycznie a wiec tak jak przystalo na sprzet z wysokiej polki.
Wraith32 V2: https://store.myairbot.com/esc/wraith32v2.html
OMNIBUS F4 Pro Corner: https://store.myairbot.com/flight-controller/omnibusf4procorner.html





Adam Wlaśko
Taki dron jest dobry na poczatek, nie za mocny?
Graczofil
Troche mocny, ale jak zaczniesz z bateriami 3S to sadze ze bedzie git.
TheCorel
Wielkie dzieki, fajnie ze dajesz takie artykuły!
4PV
Dron konkret…
Dorian
Szkoda ze to tyle kosztuje, kusisz jednak by kupic i zrobić taki sprzęt 😛
Dominix
Mozna kupic takiego drona u nas, jakis polecasz na poczatek ?
Graczofil
U nas bedzie ciezko, polecam chinskie sklepy + wysylka.